There is a running commentary at end:
( NOTE: All timings shown here are at Spacecraft end. Rosetta will be about 511 million kms from Earth and one-way light time between Rosetta and Earth would be about 28 minutes 20 seconds. So Earth will see these incidents 28 minutes 20 seconds late )
A table showing timeline of Earth Reporting in Indian Standard Time ( IST ) is here

On 15th Oct '14 Rosetta entered in sub 10 kms orbit around 67P/C-G - closest ever approach of any orbiter around a comet. We already covered it in an earlier post.
As explained there apart from doing near field observations of the comet, Rosetta is also carrying with it a Landing gear called as Philae.
The Philae will be released for a first ever soft landing on a comet and will actually conduct several experiments on its surface in the highly dynamic phase of any comet viz. the passage through perihelion when it is nearest to the Sun and its tail is spread longest.
The actual landing of Philae is planned to be conducted on 12th Nov 2014 which is a historic moment in mankind's history.
We will cover this event step by step here.
PREPARATIONS FOR SEPARATION:
On 11th Nov at 1935 UT it will begin a very crucial and complex maneuver seen in this figure to bring the spacecraft in front of the comet on the Sun side, technically described as ‘Lining up for Separation’ lasting 40 minutes. 10 minutes later the Flywheel which will stabilize Philae in its descent will start rotating.
MISSION CONTROLLERS DECIDE:
Meanwhile Mission controllers will check whether the maneuver was correctly executed and on target. Once everything is confirmed to be OK, a "go for separation" command will be issued. So this verification and 'Go Ahead' signal issuance will take over an hour due to signal delays of 28 minutes and that is why there is a Two hours gap between pre-delivery maneuver and actual release of Philae from Rosetta.
Even as the mission controllers take this decision Rosetta and Philae continue with preparations started earlier. getting ready for a possible separation. At 1805 UT, the Philae ‘switch on’ will be initiated. After a warm-up of 20 minutes Active Descent System ( ADS) valve will be opened at 1837 UT. This system emits cold gas thrust in upward direction to counteract the recoil when two Harpoons ( we will come to that later ) are fired at the time of landing.
At 2003 UT Rosetta will start turning ( Slew ) in attitude which will last for 40 minutes. Flywheel which stabilizes Lander Philae during descent will start rotating at 2024 UT.
It imaged comet from all around as it spun around. This orbit continued till 31st Oct when it was maneuvered in Pre- Delivery orbit in preparation for the position required for actual delivery of Philae.This transition and various other other maneuvers are shown in this figure.
At 0400UT on 12th Nov, Rosetta will start for final orientation to release Philae at its Landing site and ensure that the mothership will not interfere in the path of Lander. This will last 6 minutes. This operation brings the Rosetta in a position to release Philae in correct direction. After the state review upto this point a final ‘Go Ahead’ will be issued by mission controllers between 0635 UT ( Earliest time ) and 0735 UT ( Latest time ).
Between 0721UT-0823 UT ( under normal start of operations ) systematic switch on of MUPUS, CIVA, ROLIS, SESAME and CONSERT instruments on Philae will be carried out. A counterpart of CONSERT which is on Rosetta will also start functioning. At 0825 UT Lander will switch to its own power.
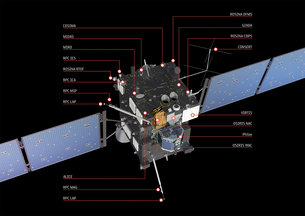
Adjacent figure shows various instruments in Philae. It is packed with a cache of Instruments. A slideshow describing each instrument will be posted shortly in Slideshare.
SEPARATION :
After all these are readied , at 08:35 UT, the lander Philae will be released from a distance of 22.5 kms from comet. Philae weighs 100 kgs and it can be pushed away from the orbiter by a regular ejection mechanism ( screw type push ) at a selectable speed of between 0.05 m/s and 0.51 m/s, optimum speed is expected to be about 0.18 m/s. The exact value will be decided autonomously by onboard systems since human intervention is not possible at this stage due to transmission delay.
If the lander somehow fails to be released via this 'speed adjustable' release mechanism then a backup spring mechanism will ensure that the lander is released at a fixed speed of .18m/s.
As soon as it is released CIVA camera will take a couple of ‘farewell’ photographs of its mother-ship Rosetta. At a distance of 100meters from Rosetta ( i.e. 100/ (0.18 m/s) = 555 seconds delay ) at 0843 UT , ROMAP boom and the 3 Landing legs will be extended. During descent at 0857 UT lander will rotate itself by 14 deg so that it lands in correct orientation.
After the release of Philae At 0915 UT Rosetta will change its direction so that it will be able to relay signals between Philae and Earth. During this maneuver antenna on Rosetta will not be pointing to Earth and so there will be a loss of signal which will resume again at 1025 UT and Rosetta will start downlink of all the data stored so far from both Lander and Orbiter.
TOUCHDOWN:
At 1430 UT Lander which is still in a freefall will start its activities again by switching on Anchor mechanism and both the camera systems CIVA and ROLIS and even while they image the landing site waiting for actual touchdown on comet at 1534 UT. This event gets reported to Earth at 0602 UT.
As soon as touchdown happens ADS will release gas jet for 15 seconds from top to counteract the force being exerted by 2 harpoons that will be fired into comet to ensure that the Lander does not fly off. The flywheel will also be switched off now. Shortly afterwards ( 1538 UT ) CIVA will start Panoramic imaging of comet surface. Parellely science instruments Ptolemy and COSAC begin data gathering. This initial stage SDL (Separation, Descent & landing) science data collection is continued till 1639 UT.
In another sequence of data collection starting 1720 UT the system collects First Science Sequence data for 7 hours.
BTW don't forget: This mission equipment was conceived, designed and fabricated sometime in 2002 when the technology was not as advanced as now in miniaturization and versatility. Even mission planning was done at that time. Is it not wonderful ? Hats off to those guys!!
It is worth mentioning here that the data will NOT be put in public domain for a few MONTHS so do not expect a series of beautiful images from mission cameras immediately.
Running Commentary:12th November 2014 is a historic day in Human History.
ESA's spacecraft Rosetta will release a man-made lander Philae on the comet 67P/C-G.A first time event in the history of mankind.
Webcast live from mission control:http://new.livestream.com/esa/cometlanding
Rosetta blog:http://blogs.esa.int/rosetta
ADDED at 0100 IST : The craft is found to be on correct trajectory. 1st GO/NOGO decision is given as OK .. Go Ahead!!
There was a small hiccup initially when heating of Philae started but it was overcome.
This the 1st of 4 GO/NOGO points before the final go ahead for release of Philae.
If any GO/NOGO decision is negative then the operation will be aborted and it will take atleast 2 weeks to reprogram the new set of landing sequence.
2nd decision will be at 0530 IST and 3rd will be at 0705 IST 4th at 1205 or 1305 IST
=======
00:10 GMT
2nd GO/NOGO decision : GO AHEAD!!
Commands for release of Philae have now been finalized.. to be uploaded shortly.
Next GO/NOGO update will now be delayed to 0805 IST
=======
3rd GO/NOGO is positive!!! Both Rosetta and Philae have a GO Ahead for Separation.
Rosetta maneuver for separation positioning will start as scheduled at 0958 IST
Final GO/NOGO announcement set for 1305 IST
=======
Cold Gas thruster in ADS ( Active Descent System ) used to provide counter-force when the harpoons fire has shown up a problem and will not function during touchdown. But mission controllers do not anticipate it as a major malfunction and say that operations will go on as scheduled because the harpoons and the screws should be able to hold the craft down.
=====
More details now available about ADS problem:
ADS has a gas tank with a wax seal. In order to release the gas to outlet mechanism the seal needs to be punctured with a pin. There is also a redundant pin. The change in pressure should acknowledge that pin has punctured the seal. But no pressure change happened even after four attempts.
It is possible that pressure sensing mechanism may be giving erroneous readings even though the seal has been punctured.
In spite of a possible failure the landing was not postponed because it is felt that there is no point in trying again the thing later ( in next attempt after 2 weeks ) which was already attempted 4 times.
=====
Departing image of mother-ship Rosetta by Philae
And mothership also checks .. bachheke paira khul gaye ji

AND FINALLY ....... IT HAS LANDED ON COMET 67P/C-G ! ! ! !
( NOTE: All timings shown here are at Spacecraft end. Rosetta will be about 511 million kms from Earth and one-way light time between Rosetta and Earth would be about 28 minutes 20 seconds. So Earth will see these incidents 28 minutes 20 seconds late )
A table showing timeline of Earth Reporting in Indian Standard Time ( IST ) is here
On 15th Oct '14 Rosetta entered in sub 10 kms orbit around 67P/C-G - closest ever approach of any orbiter around a comet. We already covered it in an earlier post.
As explained there apart from doing near field observations of the comet, Rosetta is also carrying with it a Landing gear called as Philae.
 |
| Detailed view of the Lander Philae |
The Philae will be released for a first ever soft landing on a comet and will actually conduct several experiments on its surface in the highly dynamic phase of any comet viz. the passage through perihelion when it is nearest to the Sun and its tail is spread longest.
The actual landing of Philae is planned to be conducted on 12th Nov 2014 which is a historic moment in mankind's history.
We will cover this event step by step here.
PREPARATIONS FOR SEPARATION:
 |
| Various complex maneuvers in the orbit are shown here. |
On 11th Nov at 1935 UT it will begin a very crucial and complex maneuver seen in this figure to bring the spacecraft in front of the comet on the Sun side, technically described as ‘Lining up for Separation’ lasting 40 minutes. 10 minutes later the Flywheel which will stabilize Philae in its descent will start rotating.
MISSION CONTROLLERS DECIDE:
Meanwhile Mission controllers will check whether the maneuver was correctly executed and on target. Once everything is confirmed to be OK, a "go for separation" command will be issued. So this verification and 'Go Ahead' signal issuance will take over an hour due to signal delays of 28 minutes and that is why there is a Two hours gap between pre-delivery maneuver and actual release of Philae from Rosetta.
Even as the mission controllers take this decision Rosetta and Philae continue with preparations started earlier. getting ready for a possible separation. At 1805 UT, the Philae ‘switch on’ will be initiated. After a warm-up of 20 minutes Active Descent System ( ADS) valve will be opened at 1837 UT. This system emits cold gas thrust in upward direction to counteract the recoil when two Harpoons ( we will come to that later ) are fired at the time of landing.
At 2003 UT Rosetta will start turning ( Slew ) in attitude which will last for 40 minutes. Flywheel which stabilizes Lander Philae during descent will start rotating at 2024 UT.
It imaged comet from all around as it spun around. This orbit continued till 31st Oct when it was maneuvered in Pre- Delivery orbit in preparation for the position required for actual delivery of Philae.This transition and various other other maneuvers are shown in this figure.
At 0400UT on 12th Nov, Rosetta will start for final orientation to release Philae at its Landing site and ensure that the mothership will not interfere in the path of Lander. This will last 6 minutes. This operation brings the Rosetta in a position to release Philae in correct direction. After the state review upto this point a final ‘Go Ahead’ will be issued by mission controllers between 0635 UT ( Earliest time ) and 0735 UT ( Latest time ).
Between 0721UT-0823 UT ( under normal start of operations ) systematic switch on of MUPUS, CIVA, ROLIS, SESAME and CONSERT instruments on Philae will be carried out. A counterpart of CONSERT which is on Rosetta will also start functioning. At 0825 UT Lander will switch to its own power.
 |
| Science instruments on Philae |
Adjacent figure shows various instruments in Philae. It is packed with a cache of Instruments. A slideshow describing each instrument will be posted shortly in Slideshare.
SEPARATION :
After all these are readied , at 08:35 UT, the lander Philae will be released from a distance of 22.5 kms from comet. Philae weighs 100 kgs and it can be pushed away from the orbiter by a regular ejection mechanism ( screw type push ) at a selectable speed of between 0.05 m/s and 0.51 m/s, optimum speed is expected to be about 0.18 m/s. The exact value will be decided autonomously by onboard systems since human intervention is not possible at this stage due to transmission delay.
If the lander somehow fails to be released via this 'speed adjustable' release mechanism then a backup spring mechanism will ensure that the lander is released at a fixed speed of .18m/s.
As soon as it is released CIVA camera will take a couple of ‘farewell’ photographs of its mother-ship Rosetta. At a distance of 100meters from Rosetta ( i.e. 100/ (0.18 m/s) = 555 seconds delay ) at 0843 UT , ROMAP boom and the 3 Landing legs will be extended. During descent at 0857 UT lander will rotate itself by 14 deg so that it lands in correct orientation.
After the release of Philae At 0915 UT Rosetta will change its direction so that it will be able to relay signals between Philae and Earth. During this maneuver antenna on Rosetta will not be pointing to Earth and so there will be a loss of signal which will resume again at 1025 UT and Rosetta will start downlink of all the data stored so far from both Lander and Orbiter.
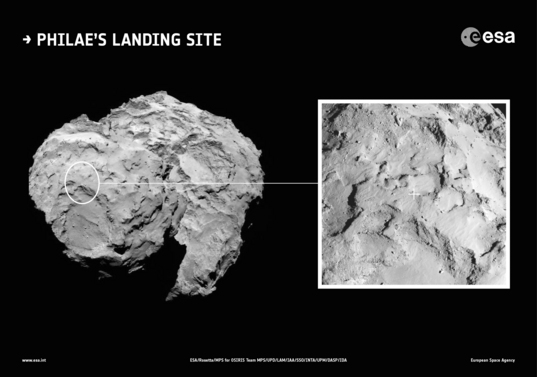 |
| The landing site ( Located on a smaller of the two lobes of comet, previously marked as J , but now renamed Agilkia after the island where artifacts from Temple of Isis are stored when the temple site went under water due to the building of Aswan dam |
TOUCHDOWN:
At 1430 UT Lander which is still in a freefall will start its activities again by switching on Anchor mechanism and both the camera systems CIVA and ROLIS and even while they image the landing site waiting for actual touchdown on comet at 1534 UT. This event gets reported to Earth at 0602 UT.
As soon as touchdown happens ADS will release gas jet for 15 seconds from top to counteract the force being exerted by 2 harpoons that will be fired into comet to ensure that the Lander does not fly off. The flywheel will also be switched off now. Shortly afterwards ( 1538 UT ) CIVA will start Panoramic imaging of comet surface. Parellely science instruments Ptolemy and COSAC begin data gathering. This initial stage SDL (Separation, Descent & landing) science data collection is continued till 1639 UT.
BTW don't forget: This mission equipment was conceived, designed and fabricated sometime in 2002 when the technology was not as advanced as now in miniaturization and versatility. Even mission planning was done at that time. Is it not wonderful ? Hats off to those guys!!
It is worth mentioning here that the data will NOT be put in public domain for a few MONTHS so do not expect a series of beautiful images from mission cameras immediately.
Running Commentary:12th November 2014 is a historic day in Human History.
ESA's spacecraft Rosetta will release a man-made lander Philae on the comet 67P/C-G.A first time event in the history of mankind.
Webcast live from mission control:http://new.livestream.com/esa/cometlanding
Rosetta blog:http://blogs.esa.int/rosetta
ADDED at 0100 IST : The craft is found to be on correct trajectory. 1st GO/NOGO decision is given as OK .. Go Ahead!!
There was a small hiccup initially when heating of Philae started but it was overcome.
This the 1st of 4 GO/NOGO points before the final go ahead for release of Philae.
If any GO/NOGO decision is negative then the operation will be aborted and it will take atleast 2 weeks to reprogram the new set of landing sequence.
2nd decision will be at 0530 IST and 3rd will be at 0705 IST 4th at 1205 or 1305 IST
=======
00:10 GMT
2nd GO/NOGO decision : GO AHEAD!!
Commands for release of Philae have now been finalized.. to be uploaded shortly.
Next GO/NOGO update will now be delayed to 0805 IST
=======
3rd GO/NOGO is positive!!! Both Rosetta and Philae have a GO Ahead for Separation.
Rosetta maneuver for separation positioning will start as scheduled at 0958 IST
Final GO/NOGO announcement set for 1305 IST
=======
Cold Gas thruster in ADS ( Active Descent System ) used to provide counter-force when the harpoons fire has shown up a problem and will not function during touchdown. But mission controllers do not anticipate it as a major malfunction and say that operations will go on as scheduled because the harpoons and the screws should be able to hold the craft down.
=====
More details now available about ADS problem:
ADS has a gas tank with a wax seal. In order to release the gas to outlet mechanism the seal needs to be punctured with a pin. There is also a redundant pin. The change in pressure should acknowledge that pin has punctured the seal. But no pressure change happened even after four attempts.
It is possible that pressure sensing mechanism may be giving erroneous readings even though the seal has been punctured.
In spite of a possible failure the landing was not postponed because it is felt that there is no point in trying again the thing later ( in next attempt after 2 weeks ) which was already attempted 4 times.
=====
Departing image of mother-ship Rosetta by Philae
And mothership also checks .. bachheke paira khul gaye ji
AND FINALLY ....... IT HAS LANDED ON COMET 67P/C-G ! ! ! !
===============
Update: 13th Nov 1630 Pacific time ( 14 Nov 0030GMT / 0600IST)
As per initial tweet after the above incident it said
"Maybe today we didn't just land once...we even landed twice!"
Pointing to some anomaly somewhere. We thought that it has just made a bounce after first landing. But then there was a silence for almost a day and later tweets implied that the lander has lost contact with the world ( but no one said that openly .. nobody wants that to happen ).
But now a slightly more clearer picture is emerging .. not very bright but at least a very short life is expected from Philae.
the points are :
1. Philae landed almost at the expected touchdown point and at expected time. The ADS was known to have a problem but later it was realized that even the harpoons had not fired. The screws appeared to have been rotated but the lander was not secured.
2. The Magnetic experiment instrument ROMAP indicated that the lander had undergone 3 bumps !!!... 1st 1533 UT ( these are spacecraft timings .. Earth reporting time 28 minutes later 1603 approx. ) . then a bump at 1726 and last at 1733 ..
3. The time difference of 2 hrs between 1st and 2nd landing suggests that under the weak gravity of comet ( it weighs about 10^13 kgs ) the Philae could have bumped almost 1/2 kms from surface ( caution: that is my figure ;) could be totally wrong. do not take it seriously) . It reached surface and just prior to landing its speed was 1 m/s .. it ricocheted with 38 cms /sec and so landed after 2 hrs ( low gravity is a weird thinking for Earthly humans ). Again my thinking .. no official view .. it might have slipped and landed again at the 3rd instant.
4. Now it appears to be stationary. But there is no telemetry after about 1800 UT . BUT AS PER THR THE LAST TELEMETRY, SCIENCE INSTRUMENTS HAD STARTED THEIR JOB ASSUMING A NORMAL LANDING.
5. Solar panels generating normal power but are receiving Sunlight for only 90 minutes against expected 700+ minutes.
So conclusions are : It could have landed finally in a pit blocking sunlight. A CIVAS panoramic view shows open sky in one of the cameras .. ( Normally the cameras should point to ground and so all the images should show ground ) implying that Philae is in a tilted position.
So what next? .. Philae has to work on internal batteries and so may drain them off killing the mission. One sure casualty is that the mechanically moving instruments ( MUPUS and APXS ) are no no for sure.
BUT, there is also a possibility that mission controllers will USE these mechanical devices to push up the lander in a last ditch effort. .. fingers crossed..
Pray..
==========
UPDATE : 14th Nov 1800 PST ( 15th Nov 0200UT/0730 IST )
UPDATE : 14th Nov 1800 PST ( 15th Nov 0200UT/0730 IST )
Instead of describing the activities I am reproducing essential Tweets by Philae Team ;)
Quotes from @Philae2014 ... the Lander's Tweeter Handle and my interpretation of the tweets ( not the official views of Rosetta/Philae team )
"@ESA_Rosetta I was quite a bit away from you, wasn’t I? "
Philae was out of communication for a conciderable time .. Not due to problem but a known outage due to no visibility.
Philae was out of communication for a conciderable time .. Not due to problem but a known outage due to no visibility.
"Phew! @ESA_Rosetta I am confident that our teams will find me. Wouldn’t like to lose touch with you"
Exact location of Philae is not yet known ... despite a good radio contact. Later there are some goody goody tweets and then again it is in 'radio shadow'
Exact location of Philae is not yet known ... despite a good radio contact. Later there are some goody goody tweets and then again it is in 'radio shadow'
After regaining contact :
"Good morning, Earth! It’s been a busy night at #67P! Now that I’m back in touch with my team, I’ll tell you all about it!"
"In the end, I won’t be firing my harpoons, just in case. Safety comes first!"
Firing of Harpoons into the ground may creat a counterforce to dislocate/'lift away from surface' so harpoons were not fired. Instead they initiated SD2 activity wherein lander drills a hole up to 23 cm depth and delivers material to onboard instruments for analysis
Firing of Harpoons into the ground may creat a counterforce to dislocate/'lift away from surface' so harpoons were not fired. Instead they initiated SD2 activity wherein lander drills a hole up to 23 cm depth and delivers material to onboard instruments for analysis
"Back to work! I’m now drilling into the surface of #67P… I’ll give you updates as soon as I can!"
After 7 hrs gap
"Few hours until I can communicate with @ESA_Rosetta again and transmit the @RosettaSD2 drilling results!"
So one set of SD2 ( Sampling, drilling and distribution subsystem ) experiment has been colmpleted
So one set of SD2 ( Sampling, drilling and distribution subsystem ) experiment has been colmpleted
After another 2 hrs:
" Link with @ESA_Rosetta later then expected... perhaps I moved a little bit again?!! :) " and continues:
"I confirm that my @RosettaSD2 went all the way DOWN and UP again!! First comet drilling is a fact! :) "
It appears that during ( successful ) drilling Philae has dislocated from its earlier position.
" Link with @ESA_Rosetta later then expected... perhaps I moved a little bit again?!! :) " and continues:
"I confirm that my @RosettaSD2 went all the way DOWN and UP again!! First comet drilling is a fact! :) "
It appears that during ( successful ) drilling Philae has dislocated from its earlier position.
"I just started lifting myself up a little and will now rotate to try and optimize the solar power!"
"Also my rotation was successful (35 degrees). Looks like a whole new comet from this angle :) "
ESA team appears to have lifted Philae a little and rotated it for a better illumination of Solar panels.
"Also my rotation was successful (35 degrees). Looks like a whole new comet from this angle :) "
ESA team appears to have lifted Philae a little and rotated it for a better illumination of Solar panels.
After one hour :
"56 hours that I'm on the comet now conducting science measurements non stop!
So much hard work.. getting tired... my battery voltage is approaching the limit soon now "
"56 hours that I'm on the comet now conducting science measurements non stop!
So much hard work.. getting tired... my battery voltage is approaching the limit soon now "
 |
| Plot of how the batteries have drained due to lack of Sufficient Solar Illumination ( ESA Image ) |
"I just completed a @Philae_Ptolemy measurement!!"
PTOLEMY is an experiment [Using MODULUS protocol (Methods Of Determining and Understanding Light elements from Unequivocal Stable isotope compositions) ] to understand the geochemistry of light elements, such as hydrogen, carbon, nitrogen and oxygen.
PTOLEMY is an experiment [Using MODULUS protocol (Methods Of Determining and Understanding Light elements from Unequivocal Stable isotope compositions) ] to understand the geochemistry of light elements, such as hydrogen, carbon, nitrogen and oxygen.
"Just completed another ROLIS image! That means that I've imaged 3 different spots on the comet!"
ROLIS is an Imaging System on lower plate of Philae to provide the first close-up images of the landing site
ROLIS is an Imaging System on lower plate of Philae to provide the first close-up images of the landing site
"My last scheduled measurement for part 1 of #CometLanding is @ConsertRosetta: just started!"
"I will use all my remaining energy to "communicate" between @ESA_Rosetta and myself with @ConsertRosetta"
CONSERT: COmet Nucleus Sounding Experiment by Radiowave Transmission transmits RF signals @ about 90MHz through the comet nucleus between Philae and Rosetta orbiter for studying the internal structure of Comet ( akin to CT scan )
It also appears that now ESA may stop ( at least in immediate future ) using Philae for scientific studies.
Last Update 16 Nov 00GMT
Latest quotes from Rosetta Team Blog ( Blog title speaks a lot ):
Title of Blog : OUR LANDER’S ASLEEP
With batteries depleted and not enough sunlight ..., Philae has fallen into 'idle mode' ,.... all instruments .... are shut down.
Contact lost at 00:36 UTC.
No contact possible unless sufficient sunlight falls on the solar panels.
====
And its Twitter : I'm feeling a bit tired, did you get all my data? I might take a nap… zzzzzz
====
Update on earlier post : ( from other sources : ) SD2 drill experiment requires about 80 watt-hrs
=====
On Whether 1.5 Hrs sunlight is sufficient to recharge for occasional useful bouts :
.. very unlikely ..The battery has to be heated to 0 deg C for recharge. This requires 50W. Current solar power = 1.5 Hrs * 1W ( max ) + 20 min * 4W .
So we have to wait for 1 AU from Sun ( Near perihelion ) when some chance of sporadic operations may be possible..Solar radiation /sqM .. at 1 AU = 1286.31 ( near perihelion )
at current distance ) = 142.92
Currently it is generating 1.5+1.6 = about 3 WH
so during perihelion it may generate 30WH=45W daily .. may be useful for one operation in 2 3 days .. just guess. based on the assumption that the power generation is directly proportional to incident solar radiation. .. ( this is my ASSUMPTION )
========
Update 16Nov 0815 PST ( 1615GMT / 2145 IST )
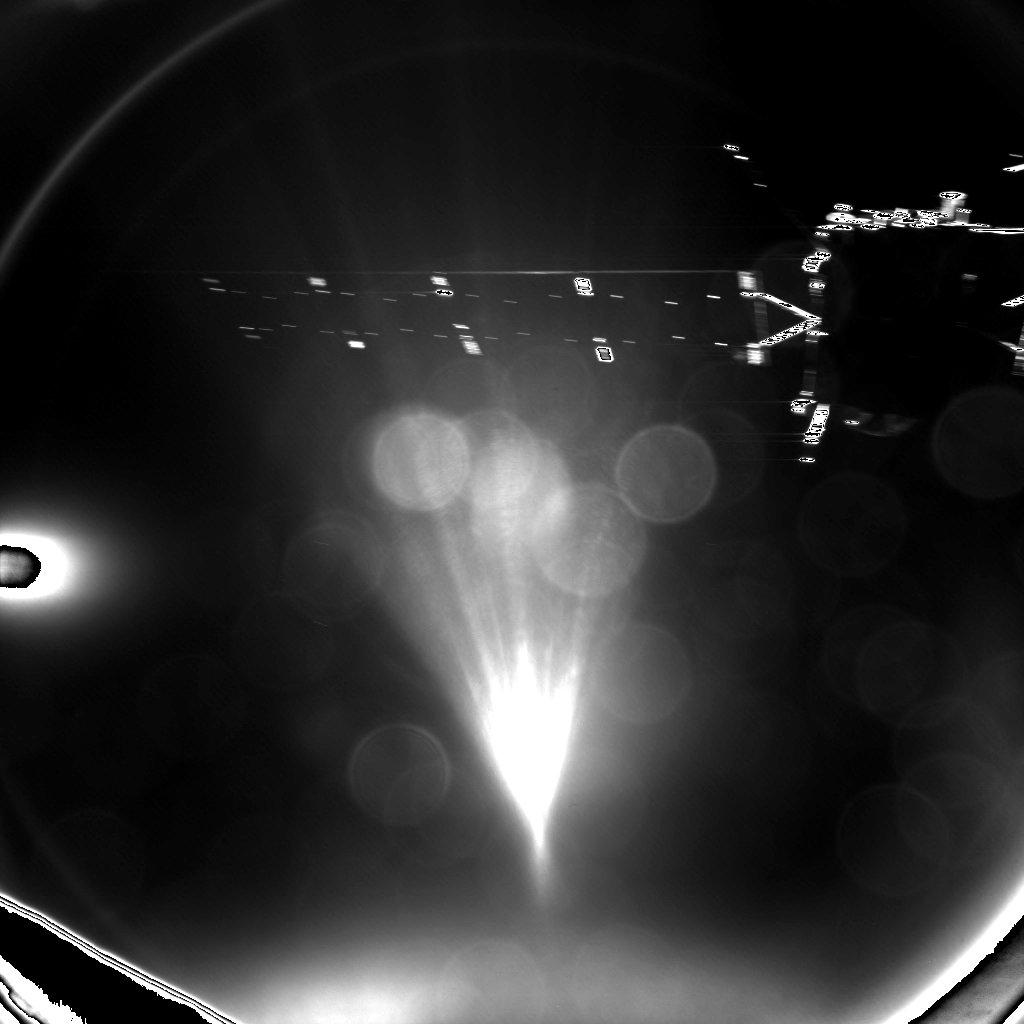
Image of Philae captured by Rosetta after 1st bounce:
ESA has republished the Earlier image sequence .. with an addition of Philae in flight after 1st bounce,
The large circle is the dust that rose when Philae touched on the comet.

After touchdown it could not harpoon the ground so it rebounced from surface and rose with about 40cms/sec. It is visible as a white dot ( identified as Philae in a small red circle ).
How do you confirm that it is not an artifact on surface? There is a tell tell shadow marked in the image.
Perhaps this is a starting point to identify a possible current resting place of orbiter because we now know the direction in which it travelled.
=====
Update 16Nov 1730 EDT ( 1130GMT / 0500 IST )
Rosetta's lander Philae is out of hibernation!
The signals were received at ESA's European Space Operations Centre in Darmstadt at 22:28 CEST on 13 June. More than 300 data packets have been analysed by the teams at the Lander Control Center at the German Aerospace Center (DLR).
This fellow refuses to give up!!
The thing drank the first sun rays and got sufficiently rejuvenated to say " Hi guys, wait and watch me during perihelion till the end of 2015!
=============== ======================== =====================
The illusive Philae ( the probe which landed on the comet surface ) was finally located in an image sent bt the orbitting craft Rosetta on 2nd SEpt 2016 from 2.7 kms altitude.
Philae landed on one side rather than on its three legs.

========================= ======================= =================
AND LAST UPDATE ;)
================= ======================== ==================== ====
Update time 30th Sept 2016/2300 Hrs IST
Today the Rosetta spacecraft was made to fall on the surface of the comet 67P/C-G as a final end of life activity.
End of Mission ( EOM ) was planned because noe the comet is going away from Sun and the level of sunlight is just not sufficient to keep the spacecraft alive anymore.
Final maneuver was started at 29 Sept 20:50 GMT when the craft was at 19 kms from the surface of comet.
Even while crash-landing it took images from very near to surface.
Based on post burn trajectory computation the landing time was computed to be : 1038 GMT and known to Earth after 40 minutes transmission delay.
Finally around 1120 GMT today [ Earth time .. on comet it was 40 minutes early ] ( 1650 IST ) the signal from Rosetta died.
That brings to an end a fantastic mission started with a launch in 2004, It orbited around the Sun about 6 times covering 8 billion-kilometres after three Earth flybys and a Mars flyby, in addition to two asteroid encounters.
In the final leg of its journey it went in a 31 months hibernation finally woke up in January 2014 in preparation of final rendezvous with the comet in August 2014.
RIP o great Rosetta and Philae.
ALL IMAGES ( EXCEPT THE ONE SHOWING MANEUVERS ) ARE FROM ESA WEBSITE
Last Update 16 Nov 00GMT
Latest quotes from Rosetta Team Blog ( Blog title speaks a lot ):
Title of Blog : OUR LANDER’S ASLEEP
With batteries depleted and not enough sunlight ..., Philae has fallen into 'idle mode' ,.... all instruments .... are shut down.
Contact lost at 00:36 UTC.
No contact possible unless sufficient sunlight falls on the solar panels.
====
And its Twitter : I'm feeling a bit tired, did you get all my data? I might take a nap… zzzzzz
====
Update on earlier post : ( from other sources : ) SD2 drill experiment requires about 80 watt-hrs
=====
On Whether 1.5 Hrs sunlight is sufficient to recharge for occasional useful bouts :
.. very unlikely ..The battery has to be heated to 0 deg C for recharge. This requires 50W. Current solar power = 1.5 Hrs * 1W ( max ) + 20 min * 4W .
So we have to wait for 1 AU from Sun ( Near perihelion ) when some chance of sporadic operations may be possible..Solar radiation /sqM .. at 1 AU = 1286.31 ( near perihelion )
at current distance ) = 142.92
Currently it is generating 1.5+1.6 = about 3 WH
so during perihelion it may generate 30WH=45W daily .. may be useful for one operation in 2 3 days .. just guess. based on the assumption that the power generation is directly proportional to incident solar radiation. .. ( this is my ASSUMPTION )
========
Update 16Nov 0815 PST ( 1615GMT / 2145 IST )
Image of Philae captured by Rosetta after 1st bounce:
ESA has republished the Earlier image sequence .. with an addition of Philae in flight after 1st bounce,
The large circle is the dust that rose when Philae touched on the comet.
After touchdown it could not harpoon the ground so it rebounced from surface and rose with about 40cms/sec. It is visible as a white dot ( identified as Philae in a small red circle ).
How do you confirm that it is not an artifact on surface? There is a tell tell shadow marked in the image.
Perhaps this is a starting point to identify a possible current resting place of orbiter because we now know the direction in which it travelled.
=====
Update 16Nov 1730 EDT ( 1130GMT / 0500 IST )
Rosetta's lander Philae is out of hibernation!
The signals were received at ESA's European Space Operations Centre in Darmstadt at 22:28 CEST on 13 June. More than 300 data packets have been analysed by the teams at the Lander Control Center at the German Aerospace Center (DLR).
This fellow refuses to give up!!
The thing drank the first sun rays and got sufficiently rejuvenated to say " Hi guys, wait and watch me during perihelion till the end of 2015!
=============== ======================== =====================
The illusive Philae ( the probe which landed on the comet surface ) was finally located in an image sent bt the orbitting craft Rosetta on 2nd SEpt 2016 from 2.7 kms altitude.
Philae landed on one side rather than on its three legs.
========================= ======================= =================
AND LAST UPDATE ;)
================= ======================== ==================== ====
Update time 30th Sept 2016/2300 Hrs IST
Today the Rosetta spacecraft was made to fall on the surface of the comet 67P/C-G as a final end of life activity.
End of Mission ( EOM ) was planned because noe the comet is going away from Sun and the level of sunlight is just not sufficient to keep the spacecraft alive anymore.
Final maneuver was started at 29 Sept 20:50 GMT when the craft was at 19 kms from the surface of comet.
Even while crash-landing it took images from very near to surface.
Based on post burn trajectory computation the landing time was computed to be : 1038 GMT and known to Earth after 40 minutes transmission delay.
| Green dot shows the landing site. |
| MY Death Pit .. Rosetta sends image of landing spot from 2 Kms |
That brings to an end a fantastic mission started with a launch in 2004, It orbited around the Sun about 6 times covering 8 billion-kilometres after three Earth flybys and a Mars flyby, in addition to two asteroid encounters.
In the final leg of its journey it went in a 31 months hibernation finally woke up in January 2014 in preparation of final rendezvous with the comet in August 2014.
RIP o great Rosetta and Philae.
ALL IMAGES ( EXCEPT THE ONE SHOWING MANEUVERS ) ARE FROM ESA WEBSITE
1 comment:
super salvi saab , very nice information
Post a Comment